Update: During the completion of the first LD-2307-XR class ship, some last minute modifications were made. These modifications are included below.
Now that the first LD class starship is about to enter service (see here), let’s take a closer look to better understand what makes this class of starship special.
But before we take a closer look at the construction, we first need to look at the tasks of the LD class:
LD class specification

Cartography of the area of operation
Each mission is assigned a certain space sector, which is to be mapped accordingly. That means, all solar systems, their position in relation to home and to each other shall be mapped. For each solar system, the number and orbits of planets, moons and most asteroids and comets should be mapped as far as possible. Likewise it is the goal to map substantial structures and bodies in the interstellar space between the individual star systems, e.g. dust clouds, free planets, interstellar asteroids etc..

Prospecting
Prospecting focuses on the exploration and search for raw materials and deposits on the planets, moons, asteroids, comets and other celestial bodies in the area of operation. The raw materials and deposits are then quantified or evaluated accordingly and entered on the star maps. A direct exploitation of deposits is not planned.
Astrophysical research
Besides the planets and other celestial bodies, also the stars have to be analyzed in more detail, e.g. to detect hazards like eruptions, high UV/gamma radiation, stability etc. and thus to determine the “habitability” of the respective system. Also the structure of the respective star gives hints about possible rare minerals and metals in the respective star system.
Description of LD-2307-XR
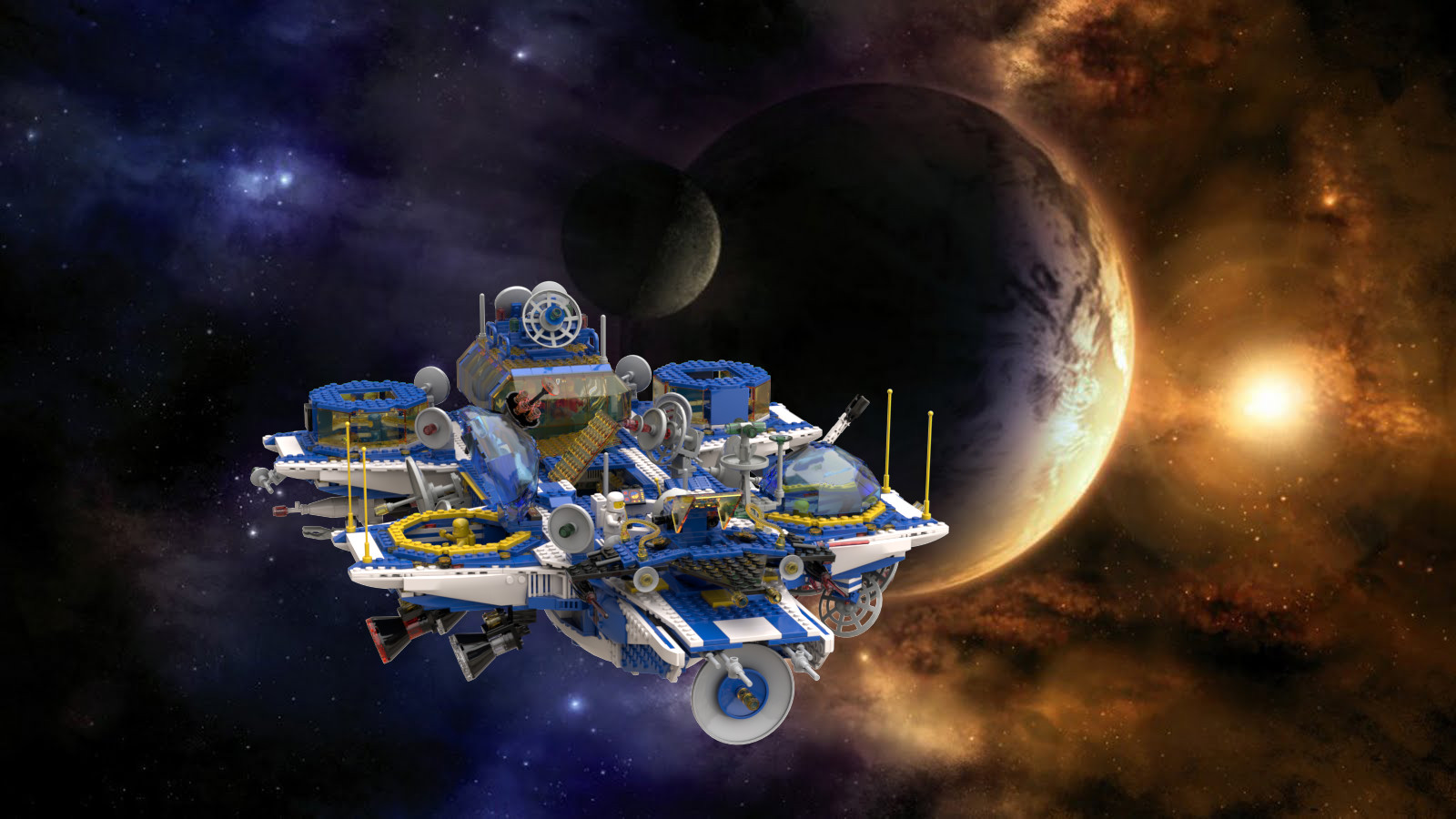
The LD-2307-XR is the first ship of the new LD class and therefore we now take a closer look at it.

Overview
The LD class is characterized by a central hull to which 4 laboratory units are attached in the fore and aft on the side. The bridge is located on the hull at the end of the ship , while at the front is the landing pad for the smaller dinghy. On the hull, there are various sensors centered on the left and right sides, depending on the configuration. There is also space on the deck for additional sensors, which can be equipped depending on the mission assignment. Also optional is the 5th laboratory on the deck, which can be operated by an astronaut or android.

The interior
The interior of the LD-2307-XR consists of 3 sections:
- Main laboratory in the bow
- Crew quarters
- Cargo bay with the planetary laboratory

Main Lab
The main laboratory in the bow is used for advanced analysis of all kinds of samples and for control and evaluation of the long and short range sensors. Also located here is the map room, where the precise maps with orbital data and properties of stars and planets are compiled.
Crew quarters
The crew quarters hold the sleeping berths and storage space for the crew. A special feature is the solar simulator, which generates “real” solar radiation and can thus illuminate the room. This helps to mitigate the negative effects of a long journey in space

Cargo bay with planetary laboratory
The cargo bay houses the planetary laboratory. From there, as soon as the main ship is in an appropriate orbit or position, it can land on rocky planets, asteroids or comets. On site, more detailed investigations of possible deposits and the atmosphere/climate can be carried out. After the end of the mission, the laboratory returns to the hangar.
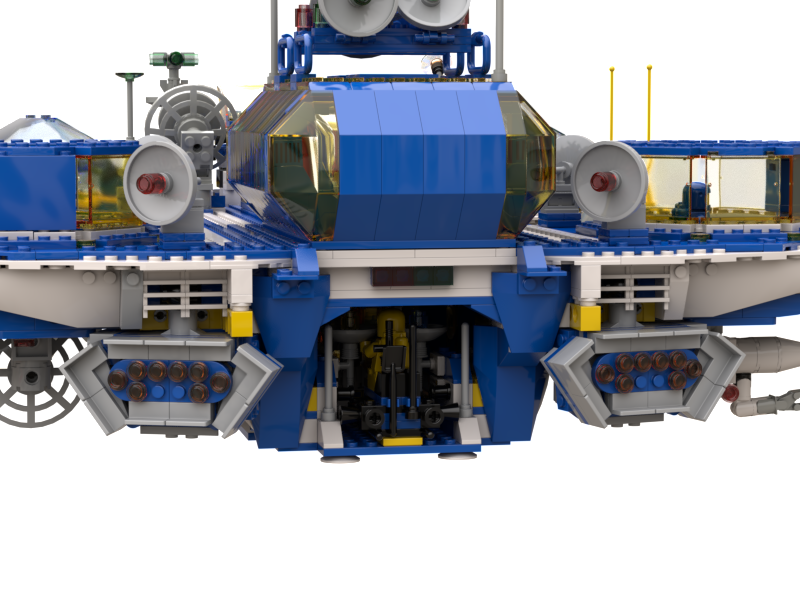
The Engine
The two independent engines are individually controllable and thrust and direction can each be set independently. The propulsion system is characterized by a high thrust bandwidth, which on the one hand allows the spacecraft to accelerate quickly to >c and to run permanently under full thrust. On the other hand, the drive allow fine thrust in the nano-Newton range based on field-emission electric thrust. This makes the LD series extremely flexible and still able to travel long distances.

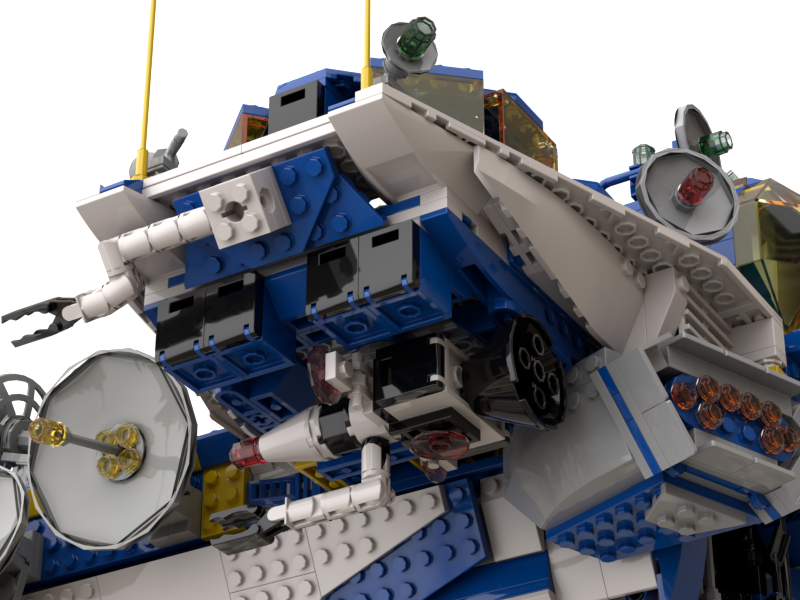
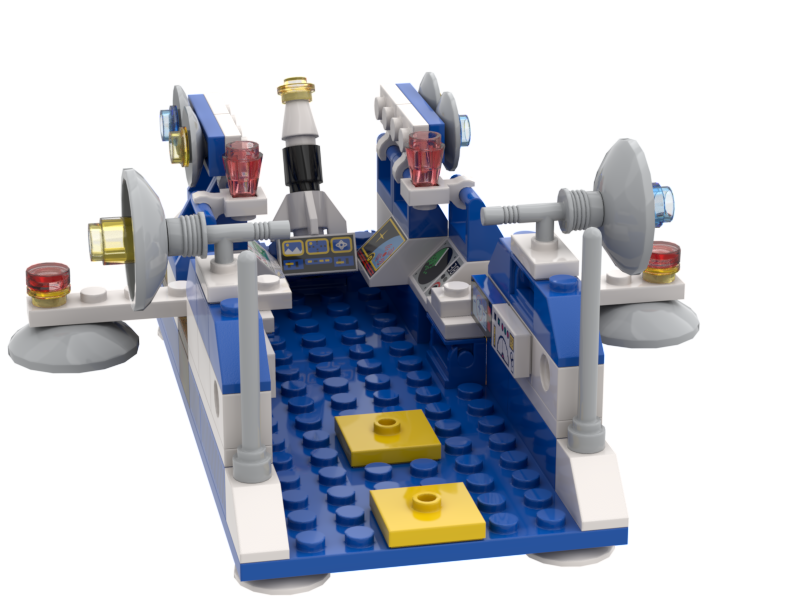
The bridge
From the bridge the spacecraft is controlled and the routes to the star systems as well as in the star systems are planned and determined. The nominal bridge crew is 3 persons, a pilot, the navigator and a commander. If more complex missions or many missions run in parallel (PlanetLab and dinghy in operation), the crew can be increased up to 6 members to directly staff the different stations.

The bridge controls the long and short range sensors for navigation. The bridge also houses the communications equipment and antennas, both for close range (PlanetLab and dinghy) and for hyperspace communications with the operations center.

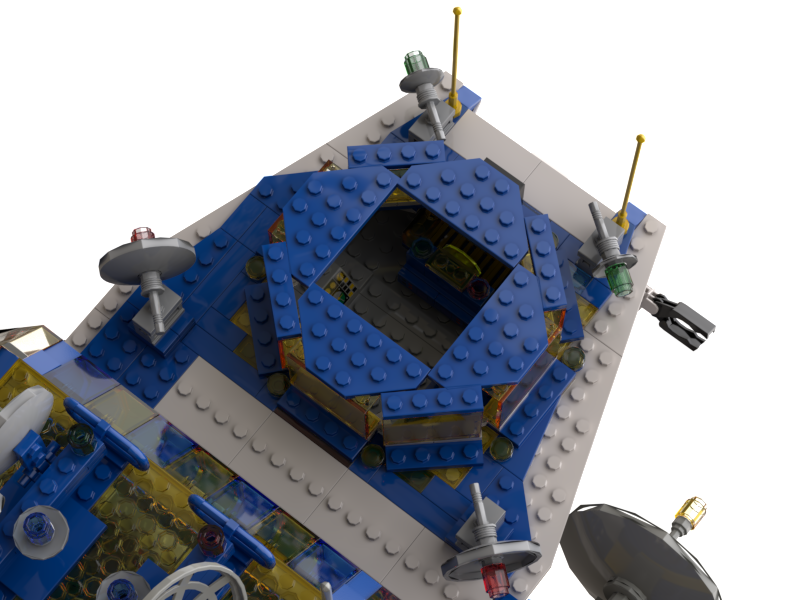
Upper deck
On the upper deck, in the present configuration, there is the landing pad for the dinghy at the bow, and a 5th laboratory and various special sensors in the center.
The 5th laboratory controls two of the three configurable sensors on the upper deck and is mainly used to create a spatial and temporal profile of the space radiation.
The Far-IR telescope (black-orange) is used to detect weak IR sources as well as to measure the slightest temperature variations in inter-stellar space.

Sensors
The LD series is equipped with two large sensors, the front navigation senor and the long range sensors, which are mounted on both sides in the middle of the hull.

Navigation sensor
The front navigation sensor is used for early detection of any obstacles in front of the spacecraft, so that appropriate evasive maneuvers can be flown in time. Due to the very high speed of >c, this is enormously important to avoid a disaster.

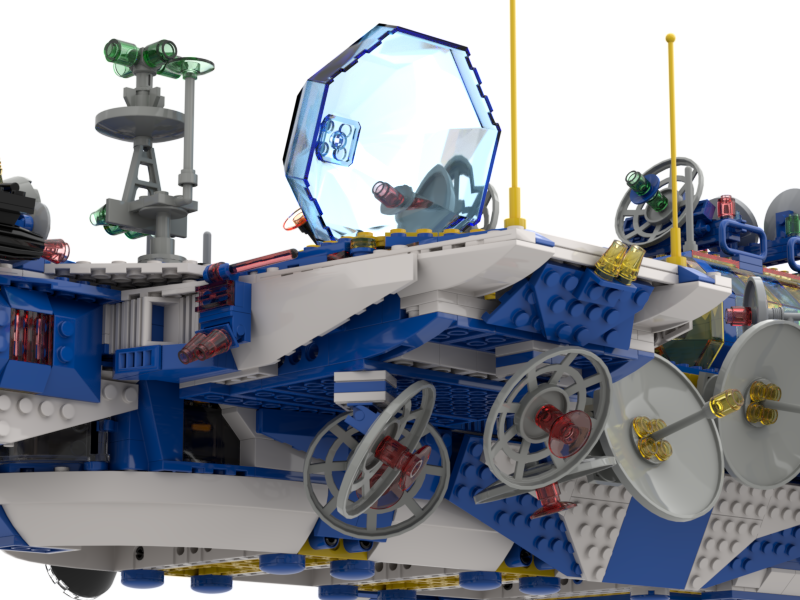
Long range sensors
The main purpose of the long range lateral sensors is to provide radiometric profiles of individual stars.
Thus, a three-dimensional map of the space sector can be created, since each star has its individual radio profile and is thus clearly identifiable. And by this the long range sensors serve also for navigation, because by this I know the stars in the environment and with it also my relative positions to them. But the radio profiles are also used in astrophysical research to determine important properties of the stars.
Laboratory units
The LD series is equipped with four laboratory units each working on a specific research area:

Lab 1 – Microwaves
Laboratory 1 is active in the field of radiometry and SAR and is mainly used as soon as the spacecraft enters the orbit of a planet to measure surface formation, but also sea levels, possible ice thickness, salinity, etc. In inter-stellar space and within a solar system, SAR units are used to detect solid celestial bodies.
The individual sensors of the Lab-1 can be aligned either individually or as a composite, depending on the operating mode. Also, each antenna can operate either as a transmitter only, as a receiver only, or in duplex mode. The mode and the spectral range can also be set for all the same or individually for each antenna. This results in a huge spectrum of observation possibilities. The sensors are controlled in the control area, also a first data evaluation takes place there while the measurement results are forwarded to the main laboratory.

Lab 2 – Light
Laboratory 2 operates in the range from long-wave infrared through visible light and ultraviolet to the extreme ultraviolet range. Even X-rays can be detected with the sensors. Thus, on the one hand, laboratory 2 supports planetary exploration / mapping, in which the LWIR and especially visual images complement the SAR images of the surface, on the other hand, especially the UV and EUV sensors are central for solar physics.

Of course, the LWIR and optical sensors are also used to detect and characterize asteroids, comets, and the like. The LWIR sensors are also extremely useful for detecting homeless planets among the stars.
Update: The telescopes could be built shorter thanks to better sensors and also the entrance optics were redesigned to take in more “light”.
Laboratory 3 – Mass spectrometry
Update: Due to the change of tasks of lab 4, mass spectrometry was concentrated in lab 3
In lab 3 everything revolves around the analysis of rock fragments, ice particles, stardust, small meteorites etc. By means of a drone, dust particles are collected from asteroids or comets, or even directly distributed in space, and then brought to the storage containers via the gripper arm and then analyzed either in Laboratory 3 or in the main laboratory. The drone has a range of about 1 AU and is controlled directly from the laboratory.
The samples are subjected to a variety of spectrometry tests, from X-Ray to Raman to laser, providing a comprehensive picture of minerals, organic material present, chemical and mineralogical composition.
Laboratory 3 has the most modern and compact LMS instruments, which detect even the smallest traces of minerals in rocks and create corresponding profiles. In combination with heliophysics, the origins of interstellar asteroids can be determined. If their composition is promising, the corresponding star systems can be approached for exploration.

Laboratory 4 – Gravitational waves
Update: Shortly before the completion of the research vessel, there was a breakthrough in the miniaturization of gravitational wave telescopes and so it was decided to include a corresponding telescope already in the first generation of the LD class.
This makes it possible to continuously observe gravitational waves while in normal space and thereby observe events in the vicinity of max. 10’000 AU.
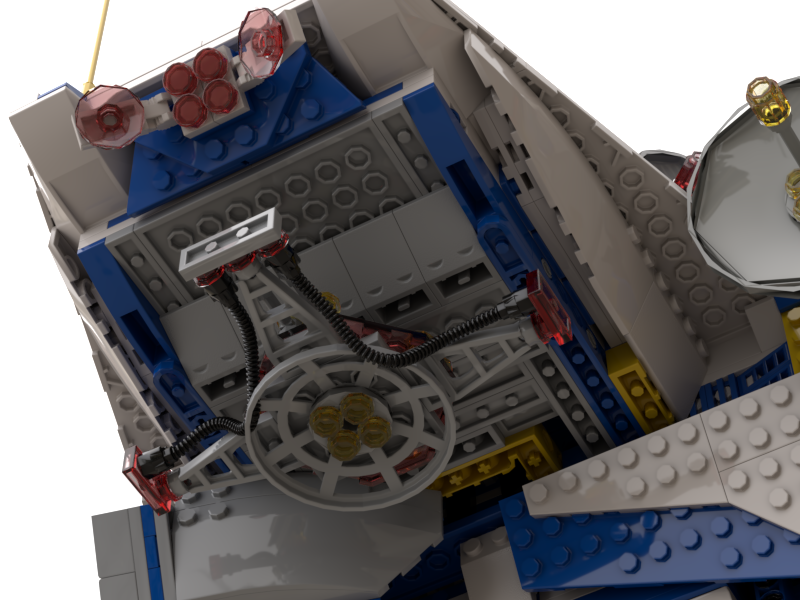
Interesting is the interaction between the laboratories 1,2 and 4, where e.g. events are already announced via first activities of the gravitational waves and can be observed in the light and microwave range.
Cargo bay
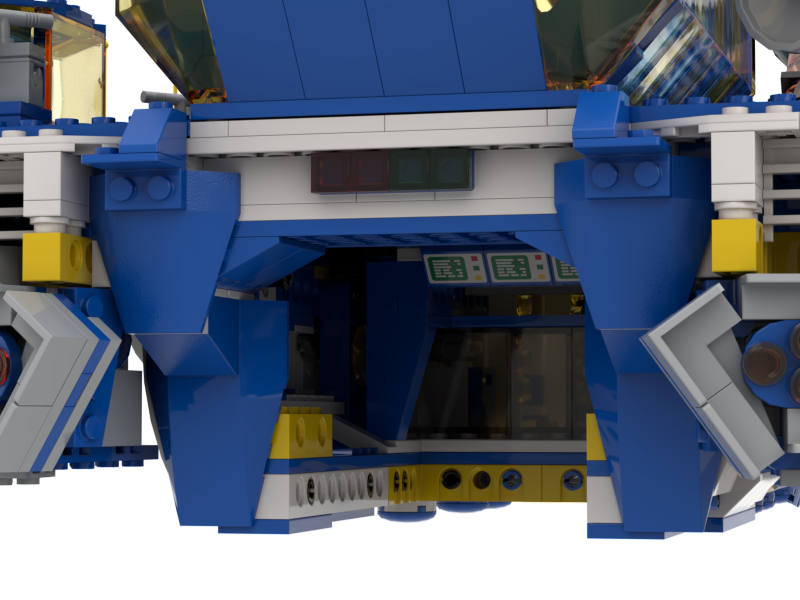
The cargo bay is where the PlanetaryLab is stowed during the setting flights. Once the lab is docked, appropriate decontamination routines are run, maintenance protocols are executed depending on the condition, and most importantly, the data from the computer and the experiments are transferred to the main computer. The laboratory is secured during the flight via two front pins and two side pins at the rear.
Planetary Lab
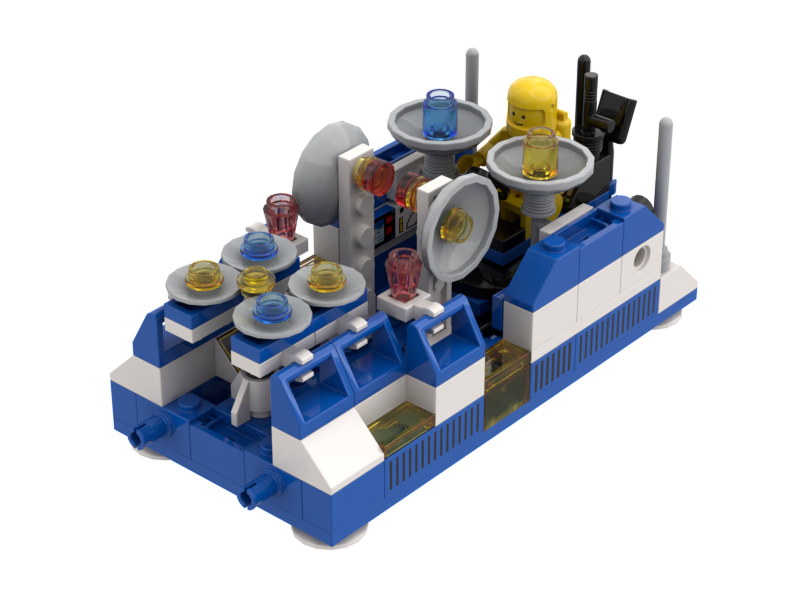
The Planetary Lab, shown here in flight configuration, combines various instruments, a research rocket and a small planetary glider in a very small space. The planetary glider also serves as the propulsion and control unit of the laboratory during the transfer from the cargo bay to the research object.
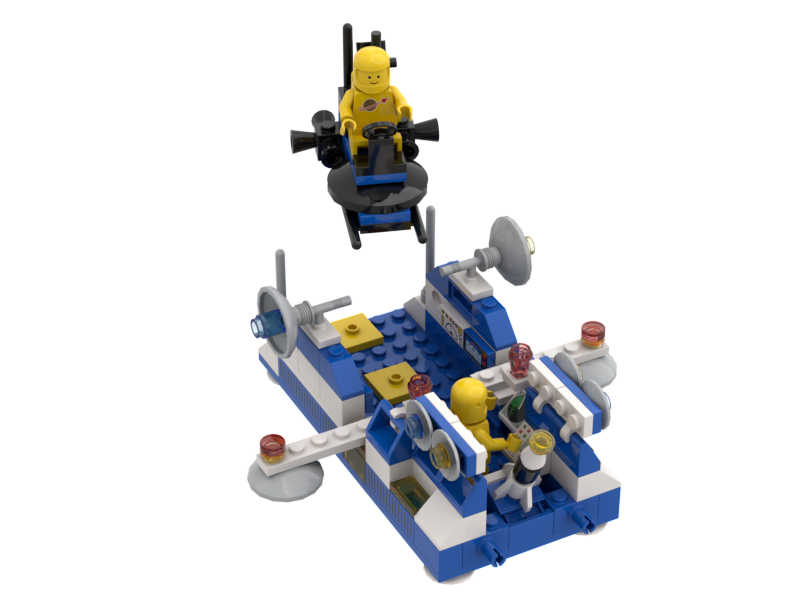
As soon as the PlanetayLab has landed, the sensors are extended and the Moon Buggy V2 also explores the environment with its ground radar. The laboratory is set down on an interesting celestial body (planet, asteroid, comet, …) in order to supplement the measurements from the Orbiit or to examine interesting places more closely. In principle, the PlanetaryLab can remain at the location indefinitely, only the crew must be exchanged in approx. 12 hour intervals.
PlanetaryLab has a wide range of instruments on board to make as many measurements as possible at each location:
- Atmospheres/Sounding Rocket
- Wind radars
- Ground penetrating radar
- Microwave sounder
- Radio wave sounder
This allows the PlanetaryLab to collect essential measurement data, e.g. at possible base locations, in a fairly short time.
Dinghy
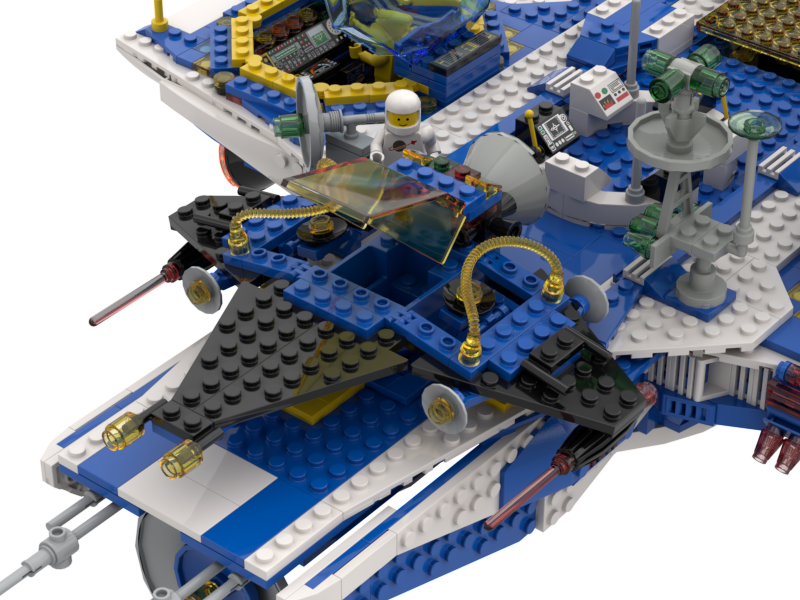
A G2 version of the DeltaWing is carried as a tender for this LD variant. The DeltaWing has been upgraded to include ground radars, space particle sensors and camera systems in addition to traditional atmospheric exploration. In addition, the DeltaWing serves as an exploration vehicle, transporter, scat, etc., allowing significantly greater flexibility during exploration missions in a star system.
During the flight through interstellar space, the dinghy is secured on the fore ship.
A small guidance radar supports the approach during landing.